Sistema tridimensional
Un objeto es tridimensional si tiene tres dimensiones. Es decir cada uno de sus puntos puede ser localizado especificando tres números dentro de un cierto rango. El sistema tridimensional mas usado en física (clásica) es el espacio: una dimension para el ancho, otra para la altura y otro para la profundidad. Para representarlo basta con el grafico de ejes cartesianos X,Y,Z. En las imágenes se puede observar el grafico con el que se representan los sistemas tridimensionales.
Sistema de coordenadas tridimensional

Un sistema cartesiano tridimensional está compuesto por tres planos perpendiculares entre sí, los cuales se interceptan en los ejes coordenados, los que se denominan ejesOx,Oy yOz. Las coordenadas de un puntoP son (x, y, z). La distancia signadas como x, y y z se llaman abscisa, ordenada y cota respectivamente. Los planos coordenados dividen al espacio en ocho regiones llamadas octantes.
 La regla de la mano derecha es: se orientan los dedos de la mano derecha, excepto el pulgar, en el sentido positivo del eje OX y se los envuelve o gira hacia el sentido positivo del eje OY, levantando recto el pulgar se tendrá el sentido positivo del eje OZ.
La regla de la mano derecha es: se orientan los dedos de la mano derecha, excepto el pulgar, en el sentido positivo del eje OX y se los envuelve o gira hacia el sentido positivo del eje OY, levantando recto el pulgar se tendrá el sentido positivo del eje OZ.
También se puede emplear la regla de la mano izquierda, como puede verse, los dedos medio, índice y pulgar se colocan en direcciones perpendiculares entre sí, se nombran los ejes a partir del dedo medio en orden alfabético.

Esta es la forma mas usual de representar los sentidos positivos de los ejes cordenados
Ejemplo 1
Un cubo tiene una arista de 8 unidades y se ubica en el sistema cartesiano tal como se ilustra en la siguiente figura. ¿Cuáles son las coordenadas del punto P?
Un cubo tiene una arista de 8 unidades y se ubica en el sistema cartesiano tal como se ilustra en la siguiente figura. ¿Cuáles son las coordenadas del punto P?

En la figura, se cumple que x = 0; y = 8 y z = 8,
Por tanto, sus coordenadas son (0, 8, 8).
- ¿Cuál será la medida del trazo OP? ¿Y el trazo OA?
Si observas la figura, identificarás que el trazo OP es la diagonal de una de sus caras. Como cada arista mide 8, entonces:
Por tanto, sus coordenadas son (0, 8, 8).
- ¿Cuál será la medida del trazo OP? ¿Y el trazo OA?
Si observas la figura, identificarás que el trazo OP es la diagonal de una de sus caras. Como cada arista mide 8, entonces:

El trazo OA es la diagonal principal del cubo, y aplicando, a partir del cálculo anterior, el Teorema de Pitágoras en el triángulo que se forma en el espacio OAP, tenemos que:

En general, podemos determinar que la diagonal principal de un cubo de lado a es igual a:

Más generalizado, podemos determinar que la diagonal principal de un paralelogramo
de largo a, ancho b y altura c tiene la forma .
.
de largo a, ancho b y altura c tiene la forma
.
Ejemplo 2
La diagonal principal de un paralelepípedo de lados 5, 10 y 12, tiene el valor de

Un ejemplo práctico de sistema de coordenadas tridimensionales, se puede ver en el computador al diseñar un cubo en tres dimensiones y que este pueda moverse a través de un programa.
Lo primero que se debe hacer es ubicar las coordenadas de los puntos principales del cubo.
Observa que el centro del sistema en este caso está ubicado en el centro del cubo donde se trazaron los ejes X, Y y Z.
Observa que el centro del sistema en este caso está ubicado en el centro del cubo donde se trazaron los ejes X, Y y Z.

Poliedros
Un poliedro es un cuerpo geométrico de tres dimensiones cuyas caras son polígonos.
Un poliedro puede ser entendido como un cuerpo sólido y tridimensional. Cuando todas sus caras y ángulos son iguales entre sí, se lo califica como un poliedro regular. De lo contrario, será un poliedro irregular. Otra clasificación posible está vinculada a la cantidad de caras que presenta. Un poliedro de seis caras recibe el nombre de hexaedro, un poliedro de cinco caras se conoce como pentaedro y así sucesivamente, formando siempre la denominación con el prefijo griego correspondiente (hexa, penta, tetra, etc.).
Partes de un poliedro Las partes fundamentales de un poliedro son:
- Caras: son los polígonos que lo delimitan.
- Aristas: lados en los que concurren dos polígonos.
- Vértices: puntos de unión de varias aristas.

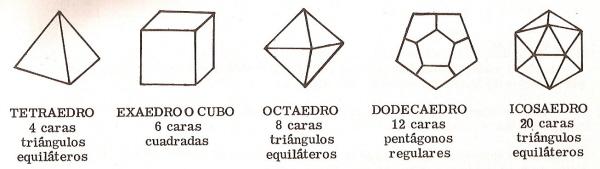
Tipos de poliedros regulares Un poliedro regular es aquel que sus caras son polígonos regulares y son todas iguales. Las aristas también son todas iguales. Existen sólo cinco tipos:
- Tetraedro regular: cuya superficie está formada por cuatro triángulos equiláteros iguales
- Cubo (o hexaedro regular): figura compuesto por seis cuadrados iguales
- Octaedro regular: figura la superficie del cual está constituida por ocho triángulos equiláteros iguales
- Dodecaedro regular: figura formado por doce pentágonos regulares iguales
- Icosaedro regular: figura las caras del cual son veinte triángulos equiláteros iguales

Tipos de poliedros irregulares Los poliedros irregulares son cuerpos geométricos cuyas caras son polígonos no todos iguales. Principalmente se clasifican por el número de caras que tiene su superficie:
- Tetraedro: cuerpo geométrico con cuatro caras que son polígonos desiguales.
- Pentaedro: cuerpo geométrico con cinco caras que son polígonos desiguales.
- Hexaedro: cuerpo geométrico con seis caras que son polígonos desiguales.
- Heptaedro: cuerpo geométrico con siete caras que son polígonos desiguales.
- Octaedro: cuerpo geométrico con ocho caras que son polígonos desiguales.
- Eneaedro: cuerpo geométrico con nueve caras que son polígonos desiguales.
- Decaedro: cuerpo geométrico con diez caras que son polígonos desiguales.
Dos casos singulares de tetraedro irregular son el tetraedro trirrectángulo y el tetraedro isofacial.

El tetraedro trirrectángulo tiene tres caras que son triángulos rectángulos, de los que sus ángulos rectos concurren en un mismo vértice. Las cuatro alturas de este tetraedro irregular concurren en un punto. Es ortocéntrico.

El tetraedro isofacial es otro tetraedro irregular cuya base es un triángulo rectángulo y sus tres cares laterales son tres triángulos isósceles iguales. Es una pirámide triangular regular.

Sólido de revolución
Un sólido de revolución es una figura sólida obtenida como consecuencia de hacer rotar una región plana alrededor de una recta cualquiera que esté contenida en el mismo plano. Una superficie de revolución es la superficie exterior de un sólido de revolución, es decir, encierra una porción de espacio dentro de la misma.
En lenguaje matemático, si tenemos dos funciones , cuya gráfica está contenida en el plano , obtendremos un sólido de revolución al rotar la gráfica de la región plana encerrada por dichas funciones alrededor de una recta dada (generalmente uno de los ejes de coordenadas o una recta paralela a uno de ellos). Un ejemplo clásico es la figura tridimensional obtenida al rotar una circunferencia cuyo centro no sea el origen de coordenadas alrededor de cualquiera de los ejes de coordenadas. El sólido de revolución generado de esta manera se conoce con el nombre de Toro (ver la figura siguiente).

Empleando el cálculo integral es posible calcular el volumen de superficies de este tipo. El que ha estudiado algo de integración sabe que la integral es una suma continua con infinitos sumandos, y a través de la definición de Riemann entendemos que se trabaja siempre con elementos de tamaño infinitesimal que, en cálculo, digamos que son los diferenciales, es decir, el que aparece en el símbolo de integración. Veamos a continuación algunos métodos para el cálculo de volúmenes de sólidos de revolución.
Método de discos
Este método consiste en algo así como "rebanar" el sólido en infinitos discos. Por ejemplo, si consideramos un cilindro, podemos "rebanarlo" en pequeñas porciones circulares. Al colocarlas todas juntas obtendremos el volumen del cilindro original. Para trabajar con el cálculo integral, es necesario que cada disco o "rebanada" tenga un grosor infinitesimal.
Así, consideraremos una sección de altura infinitesimal y con un área equivalente al de una circunferencia con radio definido como la distancia entre la función y el eje de rotación. De este modo, si cada disco tiene área igual a y espesor , entonces su volumen es (área de la base por altura).
Por tanto, el volumen del sólido de revolución generado al rotar la región plana delimitada por la curva y el eje alrededor de una recta de ecuación (paralela al eje o eje horizontal) viene dado por la expresión:
En la siguiente figura se ilustra esta idea. En ella se hace girar la región plana delimitada por la gráfica de la función (en color negro), el eje y las rectas verticales y alrededor del propio eje .

Este método sólo se puede aplicar cuando el sólido de revolución no tiene "huecos" interiores, es decir, cuando el eje de rotación está en el borde de la región plana.
Si en vez de rotar alrededor del eje horizontal lo hacemos alrededor de una recta paralela al eje vertical con ecuación , será necesario expresar en función de , es decir, si la gráfica es tendremos que , de donde
Si la función no tiene inversa en el intervalo dado se puede escoger una porción y calcular la integral en el intervalo biyectivo, y luego sumar la integral de la otra parte, ya que los volúmenes son invariantes ante la suma (la integral de una suma es la suma de las integrales).
Ejemplo 1
Calculemos el volumen del sólido mostrado en la figura anterior:
Método de coronas circulares
Cuando el eje de rotación no está en la región plana entonces no podemos considerar discos. En la siguiente figura se muestra sombreada en color azul el área de un corona circular:

Este área es la diferencia entre el área del círculo mayor y el área del círculo menor, es decir:
Aplicando un razonamiento análogo al del método de los discos, sabemos que si sumamos todos los discos diferenciales del área obtenderemos un volumen, luego hemos deducido otro método que nos permite calcular el volumen del sólido de revolución.
Tenemos entonces que el volumen del sólido de revolución generado al rotar la región plana delimitada por las curvas y tales que ( es la curva interior y es la curva exterior), alrededor de una recta , paralela al eje , será:
Ejemplo 2
Vamos a calcular el volumen del sólido de revolución formado al rotar la región plana entre las curvas , , alrededor de la recta en el intervalo , empleando el método de las coronas circulares.
Observemos la figura siguiente, en la que se muestra la región plana que rotará alrededor del eje mencionado (¿eres capaz de imaginarte el correspondiente sólido de revolución?, seguro que sí):

En este caso es claro que:
Entonces el volumen del sólido de revolución generado es:
Evaluando adecuadamente queda:
Para hacer la integral indefinida se ha utilizado el método de integración por partes. Puedes ver unos apuntes sobre métodos de integración aquí. No es muy difícil de hacer. El resultado es .
Poliedros y Cuerpos redondos
1. Los cuerpos redondos.

La geometría del espacio estudia los cuerpos que tienen tres dimensiones: longitud, anchura y altura.
Los cuerpos que tienen sus caras planas se llaman poliedros.
Los cuerpos redondos tienen alguna cara que es una superficie curva.
Los cuerpos que tienen sus caras planas se llaman poliedros.
Los cuerpos redondos tienen alguna cara que es una superficie curva.
Hay tres clases principales de cuerpos redondos: el cilindro, la esfera y el cono.
2.- Elementos de los cuerpos redondos
 |  |  |
El cilindro tiene siempre dos bases. La distancia de una base a la otra, medida sobre una recta que ha de ser perpendicular a las bases, se llama altura.
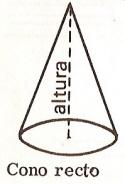
El cono tiene una base circular y una punta que se llama vértice. La distancia desde el vértice, medida sobre una recta perpendicular a la base se llama altura. La distancia que hay desde el vértice a un punto cualquiera de la circunferencia de la base se llama lado del cono.
La esfera tiene un punto llamado centro que está a la misma distancia de todos los puntos de la superficie. La esfera también tiene radio y diámetro.
3. El prisma.
Los cuerpos geométricos que tienen las caras planas se llaman poliedros.
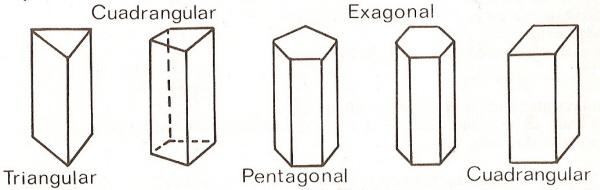
Los prismas son cuerpos poliédricos que tienen por bases dos polígonos iguales y sus caras laterales son paralelogramos.
Observando el dibujo verás que el prisma triangular tiene como base un triángulo; el cuadrangular, un cuadrilátero; el prisma pentagonal, un pentágono; el exagonal, un exágono y el cuadrangular, un un cuadrado.
Los prismas son cuerpos poliédricos que tienen por bases dos polígonos iguales y sus caras laterales son paralelogramos.
Observando el dibujo verás que el prisma triangular tiene como base un triángulo; el cuadrangular, un cuadrilátero; el prisma pentagonal, un pentágono; el exagonal, un exágono y el cuadrangular, un un cuadrado.
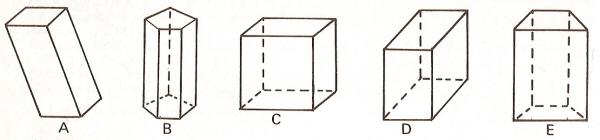
El cubo tiene todas sus caras con forma de cuadrado; el prisma paralelepípedo tiene de base un paralelogramo y sus caras son paralelas dos a dos. Los A y C son paralelepípedos; el C es cubo; el B es pentagonal y el E cuadrangular.
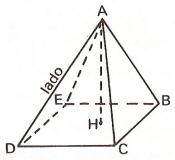
4.- La pirámide.
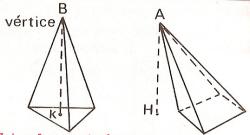
La pirámide es un cuerpo poliedro que tiene por base un polígono cualquiera y sus caras laterales son triángulos que van a parar a un punto llamado vértice.
En el dibujo de la izquierda el punto B es el vértice y la altura es el segmento BK. En el de la derecha el vértice es el punto A y la altura AH.
El tetraedro es una pirámide que todas sus caras son triángulos equiláteros.
En el dibujo de la izquierda el punto B es el vértice y la altura es el segmento BK. En el de la derecha el vértice es el punto A y la altura AH.
El tetraedro es una pirámide que todas sus caras son triángulos equiláteros.
5.- Poliedros regulares.
Los poliedros se llaman regulares cuando tienen todas sus caras iguales, sus lados iguales y también sus ángulos.
Ya hemos visto que el tetraedro tiene 4 caras que son triángulos equiláteros. También hemos visto el cubo, con 6 caras cuadradas. Los otros polígonos regulares son el octaedro, el dodecaedro y el icosaedro.
Ya hemos visto que el tetraedro tiene 4 caras que son triángulos equiláteros. También hemos visto el cubo, con 6 caras cuadradas. Los otros polígonos regulares son el octaedro, el dodecaedro y el icosaedro.